CHAP: The CHeap Arm Project
Welcome to the CHAP homepage, dedicated to a Low-Cost Tele-Operated Mobile Manipulator. Our website is still a
work in process.
We are currently adding source code and designs for CHAP as well as supporting research.
Please take a look around and feel free to support development or fork the designs for your own project!
Participants:
- Guido Bugmann - Centre or Neural and Robotic Systems at the University of Plymouth.
- Many former students (Arunaganesan Swaminathan (base+motor housing), Khushdeep Singh Mann (manipulator), Dominic Cassidy (Teleoperation))
- Technical support staff (Bob Williams, Zoltan Gombos, Mike Sloman, John Eastment, Sheila Storm).
Funding:
- University of Plymouth and private donations.
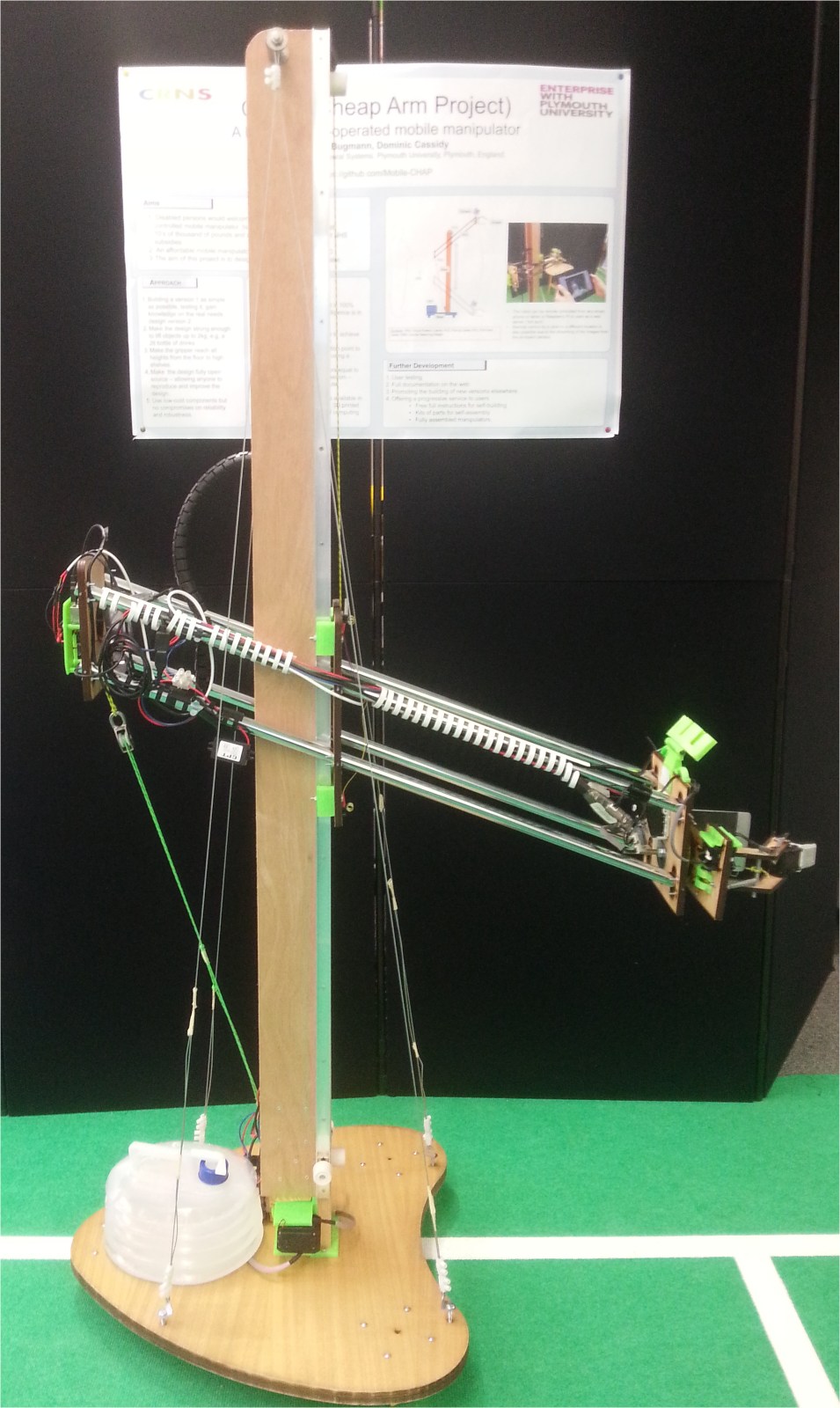
Concept:
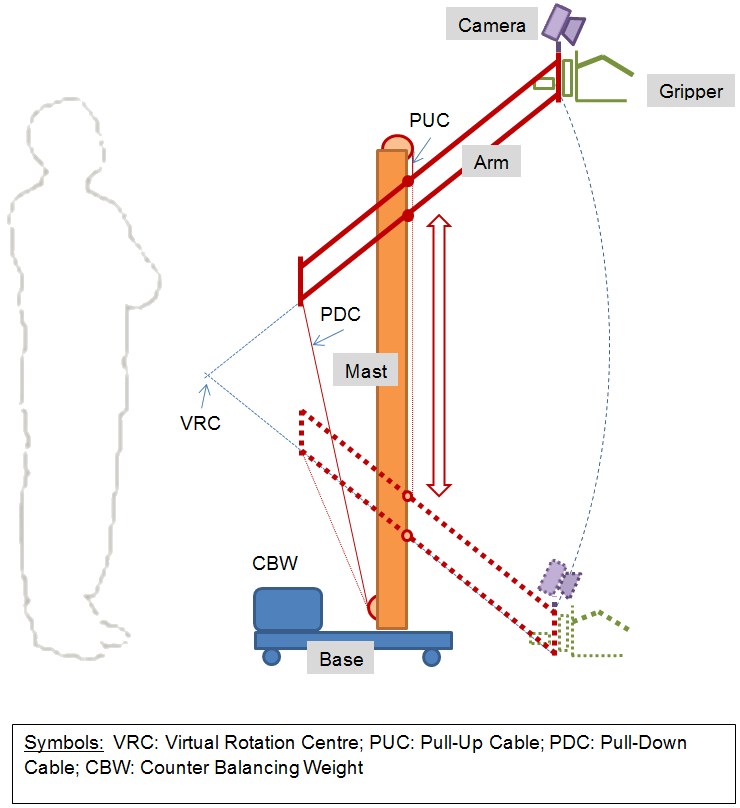
- The mobile manipulator is made of distinct components that can be individually redesigned.
Done:
- Built the mobile platform with three MX-28 dynamixel servos and omnidirectional wheel. Programming its motion programmed either from a Tartarus Board (Plymouth University Design) or from Raspberry Pi using Python and the USBToDynamixel interface.
- Built the "Mast" and its lifting mechanism for robot arm. Moved to RX-64 + pulleys system for lifting force doubling. Added stop switches at top and bottom.
- Gripper
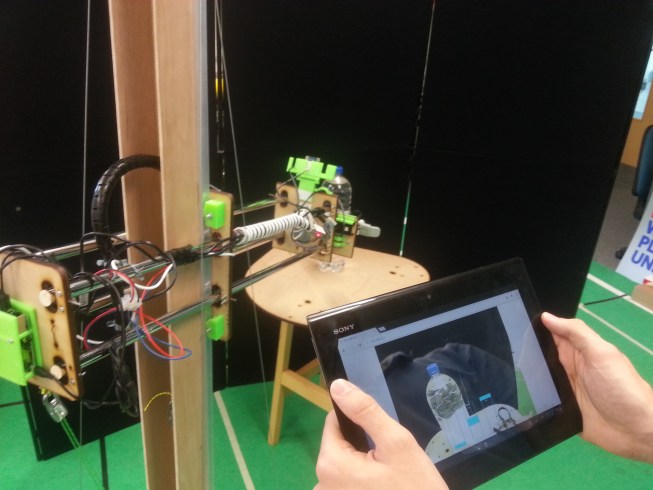
- Teleoperation interface.
- CHAP was demonstrated at the exhibition Off the Lip 2016, with only one set of batteries needed for 4h of operation. Children remote-controlled the robot for hours and had fun. The good news is that CHAP passed the children's test without any damage or failure.
- Run user tests (see the paper in the Research section).
To do:
- Replacing some of the Dynamixel Servos with cheaper alternatives.
- Make gripper control more convenient.
- Design a "smaller" version - see research paper.
- Learning object-specific fetching procedures.
- Promoting and supporting building a copy of CHAP elsewhere.
- Refine instructions - best done while helping someone building it.
Current Research
Research papers describing the developments of the robot arm and subsequent experimentation will be provided for each version of the CHAP system.
TAROS 2017
This paper preprint describes the concept of CHAP and two user-tests (done at the end of 2016) leading to recommendations for V2.
Hardware Report
This report examines the strengths and weaknesses of the robot's hardware. Following trials, it is dicovered that the gripper is underpowered and requires additional power or an improved motor for better results.
Software Report
This report desribes the logic and control flow of the developed tele-operation system. It is found that the use of web technologies created a reliable system accessible by all test operating systems and devices.
Open Source
All materials used in the development of the CHeap Arm Project are open source and fully available on GitHub. Designs and software can be found below: